



REMOTE ACCESS AND PROTECTION OF SMARTPHONES U
android,java
Farm Mitra
android application,bootstrap,mysql serv
ANTI-TERRORIST VEHICLE
java,embedded c,8051 family
ADVANCED EMBEDDED SYSTEM FOR POWER SAVING
embedded c,89x51 chip family
Friend Finder
android application,mysql server
Domestic Servers
android application,mysql server
AUTOMATIC RFID BASED SHOPPING CART
java,embedded c,89x51 family chip
Location Based Advertisement Services in Andr
java,android,php,joomla
ANTI-TERRORIST VEHICLE
Project Platform : JAVA EMBEDDED C 8051 FAMILY
Languages Used : JAVA EMBEDDED C
Project Cost : 16000
Description
The law enforcement community needs a low-cost robot that can reduce or eliminate the danger for a bomb technician who must inspect, x-ray, and disrupt an explosive device — preferably in its original place or may be sometimes need to be relocated. Sensors and tools must be placed close to a suspected device. Approaching a device can be dangerous, since many points along the path to the bomb may be booby-trapped. Even when a bomb technician uses great care in inspecting or handling an explosive device, the possibility exists that the bomber is waiting nearby to remotely detonate the device or a secondary device when the bomb technician is within range.
An Anti-Terrorist Vehicle (ATV) can reduce or eliminate the risk of potentially deadly scenarios and allow a bomb technician to focus on disabling the device. The same feature can be extended to be used in the war fields where the army might be required to go into the hostile situations where mines could have been laid. In such situations in case the human beings are allowed to go traverse over them there will be a major loss in the human resource. Thus a need arises to diffuse or locate a mine from a distance. Even if a ATV cannot diffuse a device, it can still relay information to aid in selecting tools and procedures before a technician approaches a device. In addition, events recorded by a robot’s camera can provide evidence for future forensic purposes.
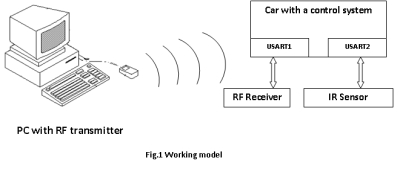
In our project we propose to design a robust wireless mobile bomb disposal unit that would be capable of reaching close to the objects of threat and the real scenario can be observed through an onboard video camera which can send back video feedback to the observatory.
The various features that we plan to incorporate in our project are as follows:
1. Forward and reverse motion
2. Turning option – Left / Right.
3. Mine detector (Metal detector)
4. Grip mechanism
5. Scissor mechanism (for cutting wires / excavating)
6. Camera rotation mechanism.
7. Alarms for bomb detection.
8. Wireless control.
9. Camera (Optional).
10. Power supply unit.
Powerful motors will be employed to make the unit move in different directions.
A stepper motor in the front will be utilized for the direction controlling mechanism and a main DC motor will be used for driving the unit in forward/reverse direction. This mechanism might be replaced with a sprocket and wheels movement in case possible.
An inductive type metal sensor mechanism will be employed that can detect the metal in a given range. This sensor will be mounted on a moving arm and can be rotated in any direction in the vicinity of the ATV.
A grip mechanism is also introduced to facilitate picking up of the bomb or mine to take it to some remote place for controlled explosion.
The front portion of the grip will also be mounted with a scissor like mechanism which can be used to cut (wires in case visible) or excavate the ground a little.
The camera will be mounted in the front and will have an option to move (rotate) to show clearly where the unit is moving and also what is the grip going to pick.
The ATV will be equipped with Audio Visual alarms to inform about a potential threat found. Upon reception of this signal the Bomb Disposal team members can do a recce and try to evaluate the environment.
The power supply unit will be on board and will be used to power the entire unit. In the prototype we will be using the power from the wall socket and the power supply unit will comprise of the AC to DC conversion and also generating the respective voltages as required by the on-board circuit.
Snapshots :-

HARDWARE AND SOFTWARE REQUIREMENTS:-
SOFTWARE REQUIREMENTS:-
1) JAVA for front end.(J2EE).
2) EMBEDDED C for back end.
HARDWARE REQUIREMENTS :-
1) 8051 Microcontroller.
2) Pc WITH A SERIAL PORT AND 128 MB RAM.